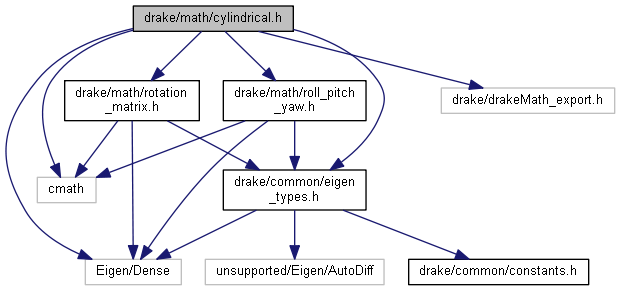
#include <cmath>
#include <Eigen/Dense>
#include "drake/common/eigen_types.h"
#include "drake/drakeMath_export.h"
#include "drake/math/roll_pitch_yaw.h"
#include "drake/math/rotation_matrix.h"
Go to the source code of this file.
|
| Matrix3d | rotz (double theta) |
| | Returns a 3D rotation matrix by theta about the z axis. More...
|
| |
| DRAKEMATH_EXPORT void | rotz (double theta, Eigen::Matrix3d *M, Eigen::Matrix3d *dM, Eigen::Matrix3d *ddM) |
| | Computes a 3D rotation matrix by theta about the z axis. More...
|
| |
| template<typename Scalar > |
| void | cylindrical2cartesian (const Vector3< Scalar > &m_cylinder_axis, const Vector3< Scalar > &m_cylinder_x_dir, const Vector3< Scalar > &cylinder_origin, const Vector6< Scalar > &x_cylinder, const Vector6< Scalar > &v_cylinder, Vector6< Scalar > &x_cartesian, Vector6< Scalar > &v_cartesian, Matrix6< Scalar > &J, Vector6< Scalar > &Jdotv) |
| |
| template<typename Scalar > |
| void | cartesian2cylindrical (const Vector3< Scalar > &m_cylinder_axis, const Vector3< Scalar > &m_cylinder_x_dir, const Vector3< Scalar > &cylinder_origin, const Vector6< Scalar > &x_cartesian, const Vector6< Scalar > &v_cartesian, Vector6< Scalar > &x_cylinder, Vector6< Scalar > &v_cylinder, Matrix6< Scalar > &J, Vector6< Scalar > &Jdotv) |
| |

 1.8.11
1.8.11 
