|
Drake
|
|
Drake
|
Functions | |
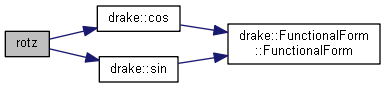
| Matrix3d | rotz (double theta) |
Returns a 3D rotation matrix by theta about the z axis. More... | |
| void | rotz (double theta, Matrix3d *M, Matrix3d *dM, Matrix3d *ddM) |
| DRAKEMATH_EXPORT void | rotz (double theta, Eigen::Matrix3d *M, Eigen::Matrix3d *dM, Eigen::Matrix3d *ddM) |
Computes a 3D rotation matrix by theta about the z axis. More... | |
| template<typename Derived > | |
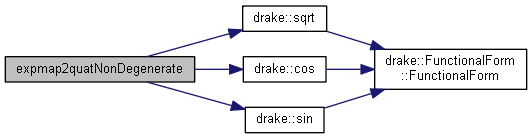
| Eigen::Matrix< typename Derived::Scalar, 4, 1 > | expmap2quatNonDegenerate (const Eigen::MatrixBase< Derived > &v, typename Derived::Scalar &theta_squared) |
| template<typename Derived > | |
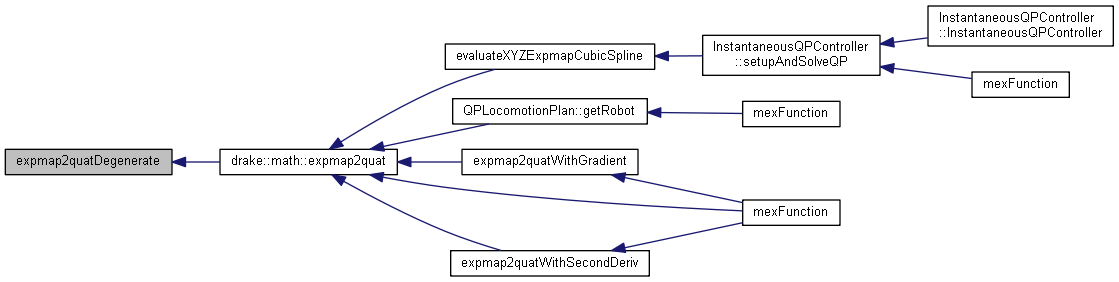
| Eigen::Matrix< typename Derived::Scalar, 4, 1 > | expmap2quatDegenerate (const Eigen::MatrixBase< Derived > &v, typename Derived::Scalar &theta_squared) |
| Eigen::Matrix<typename Derived::Scalar, 4, 1> drake::math::internal::expmap2quatDegenerate | ( | const Eigen::MatrixBase< Derived > & | v, |
| typename Derived::Scalar & | theta_squared | ||
| ) |
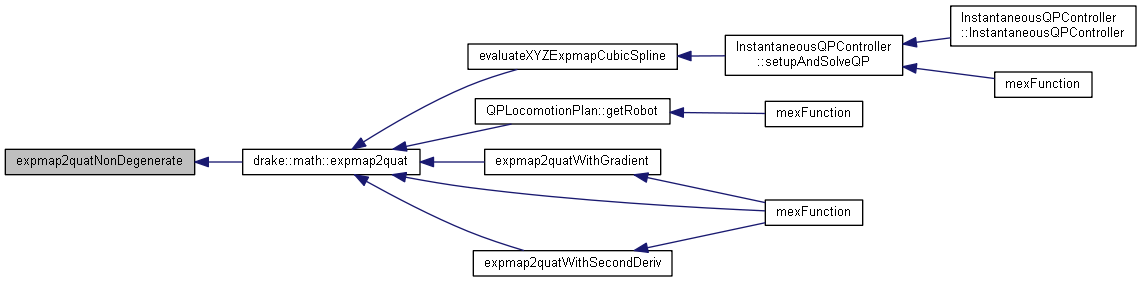
| Eigen::Matrix<typename Derived::Scalar, 4, 1> drake::math::internal::expmap2quatNonDegenerate | ( | const Eigen::MatrixBase< Derived > & | v, |
| typename Derived::Scalar & | theta_squared | ||
| ) |
| DRAKEMATH_EXPORT Eigen::Matrix3d rotz | ( | double | theta | ) |
Returns a 3D rotation matrix by theta about the z axis.

| void drake::math::internal::rotz | ( | double | theta, |
| Matrix3d * | M, | ||
| Matrix3d * | dM, | ||
| Matrix3d * | ddM | ||
| ) |
| DRAKEMATH_EXPORT void drake::math::internal::rotz | ( | double | theta, |
| Eigen::Matrix3d * | M, | ||
| Eigen::Matrix3d * | dM, | ||
| Eigen::Matrix3d * | ddM | ||
| ) |
Computes a 3D rotation matrix by theta about the z axis.
Writes that matrix into M, its derivative into dM, and its second derivative into ddM.
 1.8.11
1.8.11 
