#include <drake/systems/robotInterfaces/QPLocomotionPlan.h>
|
| | QPLocomotionPlan (RigidBodyTree &robot, const QPLocomotionPlanSettings &settings, const std::string &lcm_channel) |
| |
| template<typename DerivedQ , typename DerivedV > |
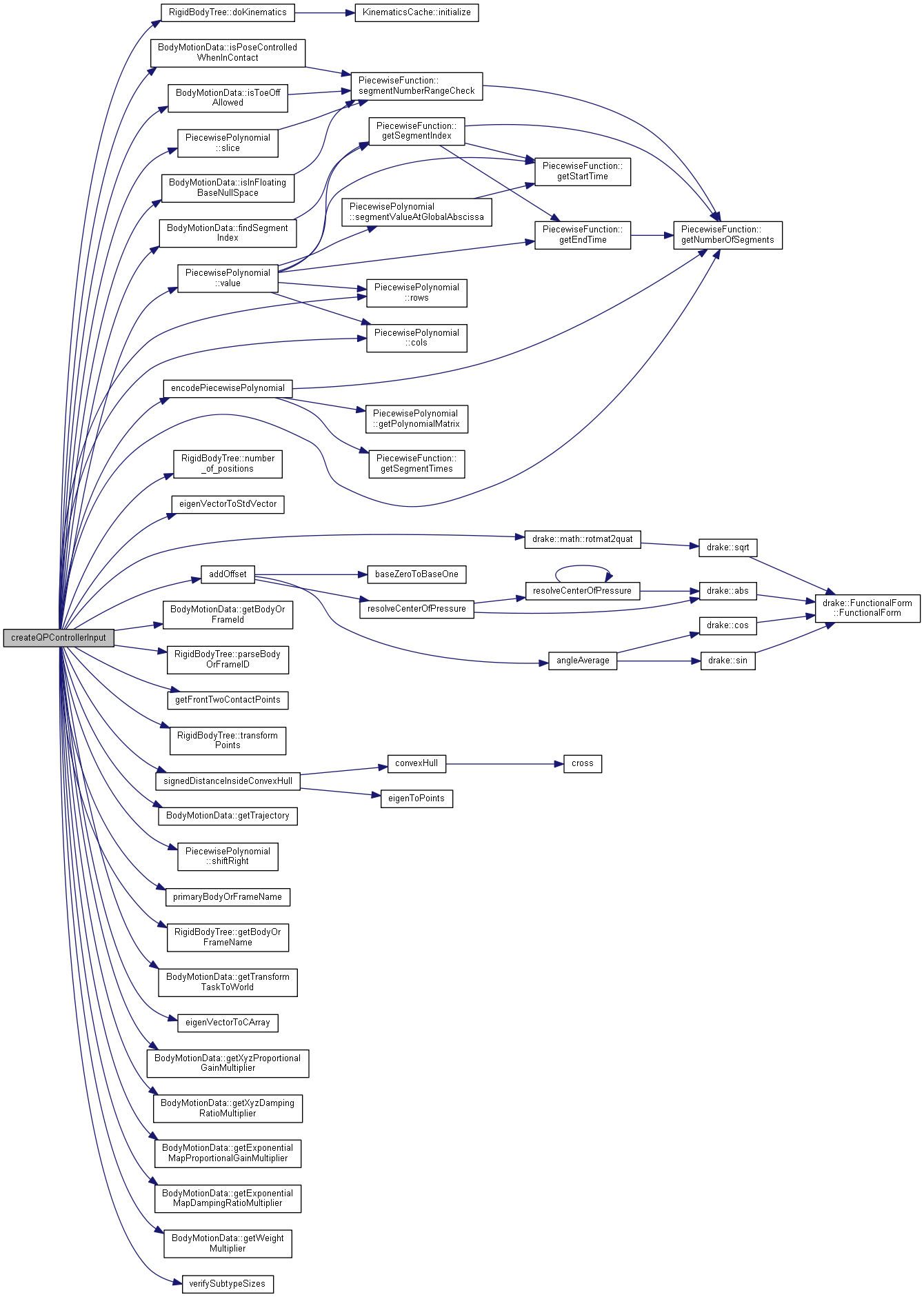
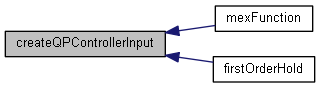
| drake::lcmt_qp_controller_input | createQPControllerInput (double t_global, const Eigen::MatrixBase< DerivedQ > &q, const Eigen::MatrixBase< DerivedV > &v, const std::vector< bool > &contact_force_detected) |
| |
| void | setDuration (double duration) |
| |
| void | setStartTime (double start_time) |
| |
| double | getStartTime () const |
| |
| double | getDuration () const |
| |
| bool | isFinished (double t) const |
| |
| drake::lcmt_qp_controller_input | getLastQPInput () const |
| |
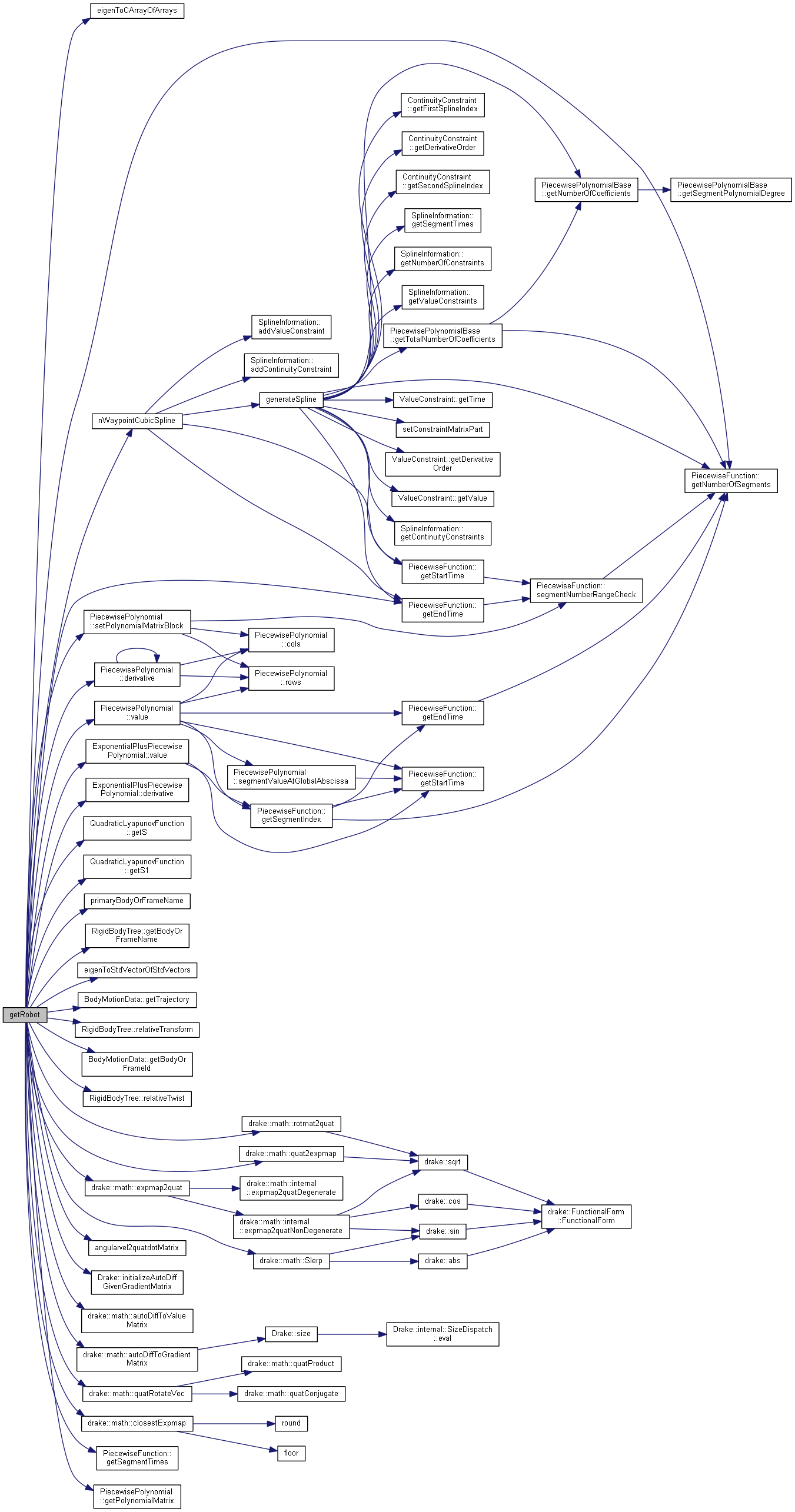
| const RigidBodyTree & | getRobot () const |
| |
| template<typename DerivedQ , typename DerivedV > |
| drake::lcmt_qp_controller_input | createQPControllerInput (double t_global, const MatrixBase< DerivedQ > &q, const MatrixBase< DerivedV > &v, const std::vector< bool > &contact_force_detected) |
| |
| drake::lcmt_qp_controller_input createQPControllerInput |
( |
double |
t_global, |
|
|
const MatrixBase< DerivedQ > & |
q, |
|
|
const MatrixBase< DerivedV > & |
v, |
|
|
const std::vector< bool > & |
contact_force_detected |
|
) |
| |
| drake::lcmt_qp_controller_input createQPControllerInput |
( |
double |
t_global, |
|
|
const Eigen::MatrixBase< DerivedQ > & |
q, |
|
|
const Eigen::MatrixBase< DerivedV > & |
v, |
|
|
const std::vector< bool > & |
contact_force_detected |
|
) |
| |
| drake::lcmt_qp_controller_input getLastQPInput |
( |
| ) |
const |
| bool isFinished |
( |
double |
t | ) |
const |
| void setDuration |
( |
double |
duration | ) |
|
| void setStartTime |
( |
double |
start_time | ) |
|
The documentation for this class was generated from the following files:








 1.8.11
1.8.11 
