Static Public Attributes inherited from RigidBodyConstraint Static Public Attributes inherited from RigidBodyConstraint |
| static const int | SingleTimeKinematicConstraintCategory = -1 |
| static const int | QuasiStaticConstraintCategory = -3 |
| static const int | PostureConstraintCategory = -4 |
| static const int | QuasiStaticConstraintType = 1 |
| static const int | PostureConstraintType = 2 |
| static const int | WorldEulerConstraintType = 5 |
| static const int | WorldGazeDirConstraintType = 6 |
| static const int | WorldGazeOrientConstraintType = 7 |
| static const int | WorldGazeTargetConstraintType = 8 |
| static const int | RelativeGazeTargetConstraintType = 9 |
| static const int | WorldCoMConstraintType = 10 |
| static const int | WorldPositionConstraintType = 11 |
| static const int | WorldPositionInFrameConstraintType = 12 |
| static const int | WorldQuatConstraintType = 13 |
| static const int | Point2PointDistanceConstraintType = 14 |
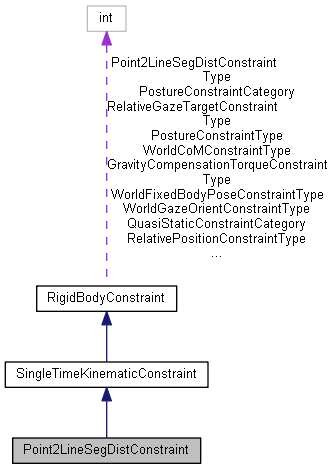
| static const int | Point2LineSegDistConstraintType = 15 |
| static const int | WorldFixedPositionConstraintType = 16 |
| static const int | WorldFixedOrientConstraintType = 17 |
| static const int | WorldFixedBodyPoseConstraintType = 18 |
| static const int | PostureChangeConstraintType = 19 |
| static const int | RelativePositionConstraintType = 20 |
| static const int | RelativeQuatConstraintType = 24 |
| static const int | RelativeGazeDirConstraintType = 25 |
| static const int | MinDistanceConstraintType = 26 |
| Protected Member Functions inherited from RigidBodyConstraint |
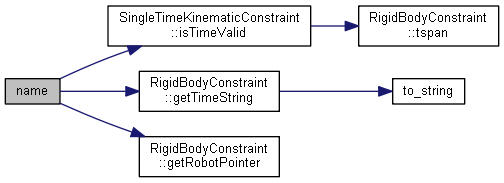
| std::string | getTimeString (const double *t) const |
| void | set_robot (RigidBodyTree *robot) |
 1.8.11
1.8.11