#include <drake/systems/plants/shapes/Geometry.h>
|
| DRAKESHAPES_EXPORT std::ostream & | operator<< (std::ostream &, const Mesh &) |
| | A toString method for this class. More...
|
| |
| Mesh |
( |
const std::string & |
uri, |
|
|
const std::string & |
resolved_filename |
|
) |
| |
Constructs a representation of a mesh to be loaded from resolved_filename.
uri provides a unique identifier used to interact with BotVisualizer.
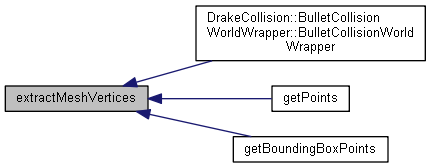
| bool extractMeshVertices |
( |
Eigen::Matrix3Xd & |
vertex_coordinates | ) |
const |
| void getBoundingBoxPoints |
( |
Eigen::Matrix3Xd & |
points | ) |
const |
|
virtual |
| void getPoints |
( |
Eigen::Matrix3Xd & |
points | ) |
const |
|
virtual |
Loads triangle mesh from an obj file into the provided vectors of vertices and triangles.
- Parameters
-
| [out] | vertices | Vector of 3D vertices in the mesh. |
| [out] | triangles | Vector of indices for each triangle in the mesh. The i-th entry of triangles holds a 3D vector of integer indices into vertices corresponding to the vertices forming the i-th triangle. |
On output, vertices.size() corresponds to the number of vertices in the mesh while triangles.size() corresponds to the number of triangles in the mesh.
| DRAKESHAPES_EXPORT std::ostream& operator<< |
( |
std::ostream & |
out, |
|
|
const Mesh & |
mm |
|
) |
| |
|
friend |
A toString method for this class.
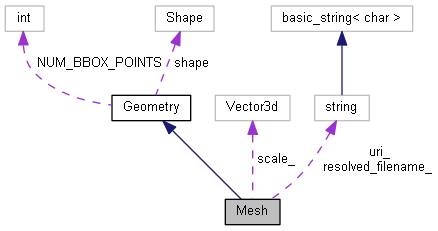
| std::string resolved_filename_ |
The documentation for this class was generated from the following files:
 Public Member Functions inherited from Geometry
Public Member Functions inherited from Geometry



 1.8.11
1.8.11 



