|
Drake
|
|
Drake
|
#include <drake/systems/controllers/QPCommon.h>
Public Member Functions | |
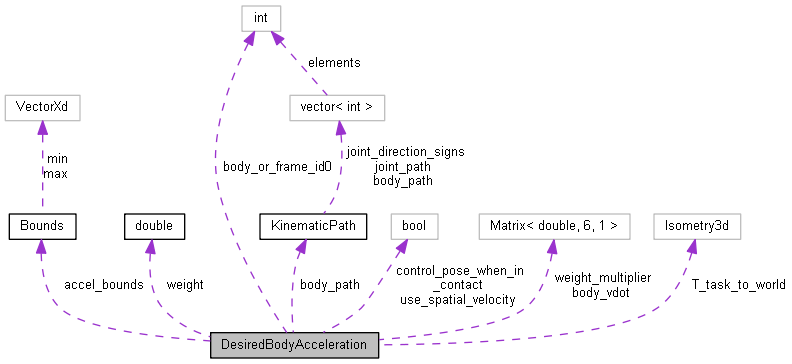
| DesiredBodyAcceleration () | |
Public Attributes | |
| int | body_or_frame_id0 |
| Vector6d | body_vdot |
| double | weight |
| Bounds | accel_bounds |
| bool | control_pose_when_in_contact |
| bool | use_spatial_velocity |
| KinematicPath | body_path |
| Eigen::Isometry3d | T_task_to_world |
| Vector6d | weight_multiplier |
|
inline |
| Bounds accel_bounds |
| int body_or_frame_id0 |
| KinematicPath body_path |
| Vector6d body_vdot |
| bool control_pose_when_in_contact |
| Eigen::Isometry3d T_task_to_world |
| bool use_spatial_velocity |
| double weight |
| Vector6d weight_multiplier |
 1.8.11
1.8.11 
