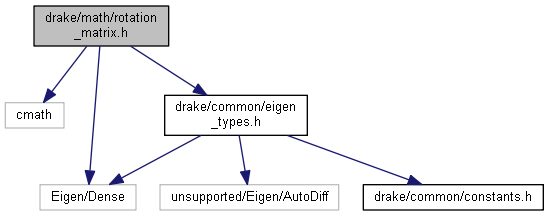
#include <cmath>
#include <Eigen/Dense>
#include "drake/common/eigen_types.h"
Go to the source code of this file.
|
| template<typename Derived > |
| Vector4< typename Derived::Scalar > | rotmat2axis (const Eigen::MatrixBase< Derived > &R) |
| |
| template<typename Derived > |
| Vector4< typename Derived::Scalar > | rotmat2quat (const Eigen::MatrixBase< Derived > &M) |
| |
| template<typename Derived > |
| Vector3< typename Derived::Scalar > | rotmat2rpy (const Eigen::MatrixBase< Derived > &R) |
| |
| template<typename Derived > |
| VectorX< typename Derived::Scalar > | rotmat2Representation (const Eigen::MatrixBase< Derived > &R, int rotation_type) |
| |

 1.8.11
1.8.11 
