|
Drake
|
|
Drake
|
Utilities for arithmetic on quaternions. More...
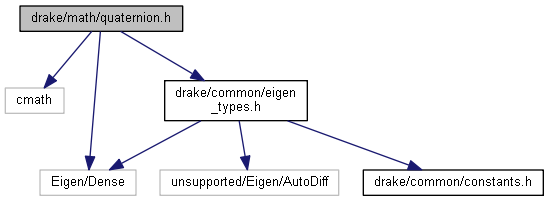

Go to the source code of this file.
Namespaces | |
| drake | |
| drake::math | |
Functions | |
| template<typename Derived > | |
| Vector4< typename Derived::Scalar > | quatConjugate (const Eigen::MatrixBase< Derived > &q) |
| template<typename Derived1 , typename Derived2 > | |
| Vector4< typename Derived1::Scalar > | quatProduct (const Eigen::MatrixBase< Derived1 > &q1, const Eigen::MatrixBase< Derived2 > &q2) |
| template<typename DerivedQ , typename DerivedV > | |
| Vector3< typename DerivedV::Scalar > | quatRotateVec (const Eigen::MatrixBase< DerivedQ > &q, const Eigen::MatrixBase< DerivedV > &v) |
| template<typename Derived1 , typename Derived2 > | |
| Vector4< typename Derived1::Scalar > | quatDiff (const Eigen::MatrixBase< Derived1 > &q1, const Eigen::MatrixBase< Derived2 > &q2) |
| template<typename Derived1 , typename Derived2 , typename DerivedU > | |
| Derived1::Scalar | quatDiffAxisInvar (const Eigen::MatrixBase< Derived1 > &q1, const Eigen::MatrixBase< Derived2 > &q2, const Eigen::MatrixBase< DerivedU > &u) |
| template<typename Derived > | |
| Derived::Scalar | quatNorm (const Eigen::MatrixBase< Derived > &q) |
| template<typename Derived1 , typename Derived2 , typename Scalar > | |
| Vector4< Scalar > | Slerp (const Eigen::MatrixBase< Derived1 > &q1, const Eigen::MatrixBase< Derived2 > &q2, const Scalar &interpolation_parameter) |
| Q = Slerp(q1, q2, f) Spherical linear interpolation between two quaternions This function uses the implementation given in Algorithm 8 of [1]. More... | |
| template<typename Derived > | |
| Vector4< typename Derived::Scalar > | quat2axis (const Eigen::MatrixBase< Derived > &q) |
| template<typename Derived > | |
| Matrix3< typename Derived::Scalar > | quat2rotmat (const Eigen::MatrixBase< Derived > &q) |
| template<typename Derived > | |
| Vector3< typename Derived::Scalar > | quat2rpy (const Eigen::MatrixBase< Derived > &q) |
| template<typename Derived > | |
| Eigen::Quaternion< typename Derived::Scalar > | quat2eigenQuaternion (const Eigen::MatrixBase< Derived > &q) |
Utilities for arithmetic on quaternions.
 1.8.11
1.8.11 
