|
Drake
|
|
Drake
|
Algorithms for simulating dynamical systems. More...
Functions | |
| template<typename System > | |
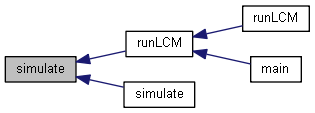
| void | runLCM (std::shared_ptr< System > sys, std::shared_ptr< lcm::LCM > lcm, double t0, double tf, const typename System::template StateVector< double > &x0, const SimulationOptions &options=default_simulation_options) |
| runLCM More... | |
| template<typename System > | |
| double | simulate (const System &sys, double ti, double tf, const typename System::template StateVector< double > &xi, const SimulationOptions &options) |
| simulate More... | |
| template<typename System > | |
| void | simulate (const System &sys, double t0, double tf, const typename System::template StateVector< double > &x0) |
| simulate More... | |
| template<typename System > | |
| void | simulate (const System &sys, double t0, double tf) |
| simulate More... | |
Algorithms for simulating dynamical systems.
Usage: rigidBodyLCMNode [options] full_path_to_urdf_or_sdf_file
with (case sensitive) options:
--base [floating_type] // can be "FIXED, ROLLPITCHYAW, or QUATERNION"
(default: QUATERNION)
| void Drake::runLCM | ( | std::shared_ptr< System > | sys, |
| std::shared_ptr< lcm::LCM > | lcm, | ||
| double | t0, | ||
| double | tf, | ||
| const typename System::template StateVector< double > & | x0, | ||
| const SimulationOptions & | options = default_simulation_options |
||
| ) |
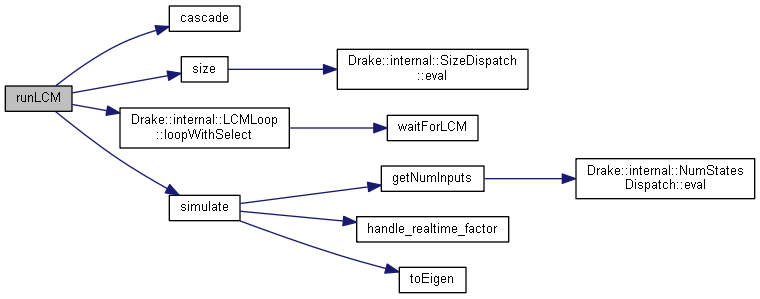
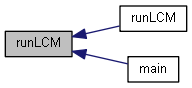
runLCM
Simulates the system with the (exposed) inputs being read from LCM and the output being published to LCM.
The input and output vector types must overload a publishLCM namespace method; the default for new vectors is to not publish anything.
| double Drake::simulate | ( | const System & | sys, |
| double | ti, | ||
| double | tf, | ||
| const typename System::template StateVector< double > & | xi, | ||
| const SimulationOptions & | options | ||
| ) |
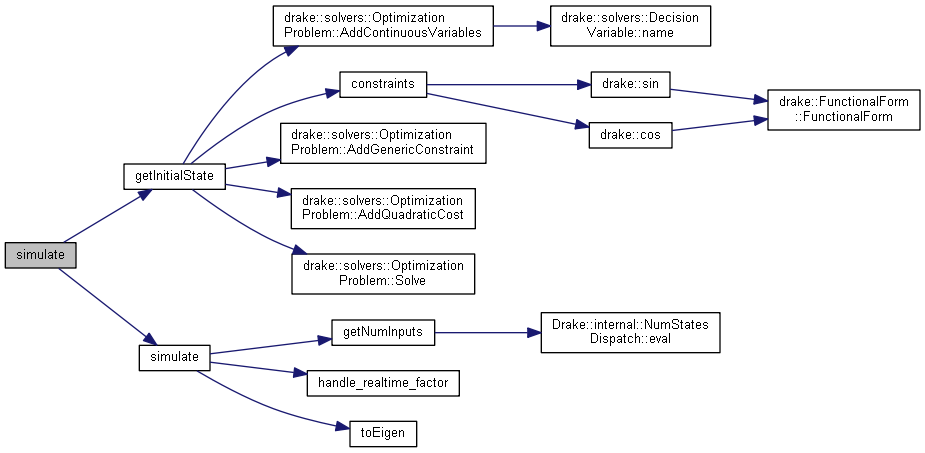
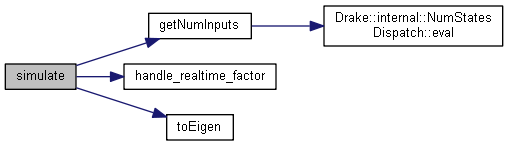
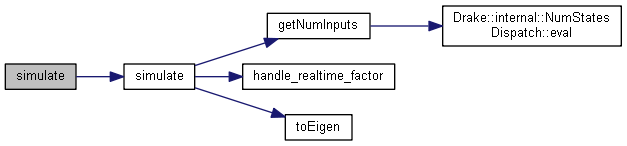
simulate
Runs a simulation given a model, it's initial conditions, and a number of simulation parameters
Currently runs with a fixed step integrator using the initial step size in options and stepping from initial time ti to final time tf. There is no error control; if you have accuracy or stability problems try a smaller step size.
| sys | The system being simulated. |
| ti | The initial time of the simulation. |
| tf | The final time of the simulation. |
| xi | The state vector of the system being simulated. |
| options | The simulation options. |
| void Drake::simulate | ( | const System & | sys, |
| double | t0, | ||
| double | tf, | ||
| const typename System::template StateVector< double > & | x0 | ||
| ) |
simulate
Runs a simulation using the default simulation options
 1.8.11
1.8.11