#include <drake/systems/Simulation.h>
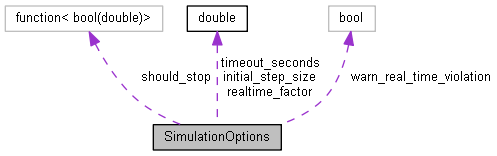
| std::function<bool(double)> should_stop |
Enables a custom simulation termination condition.
This function is called each cycle of the simulation loop. The input parameter of type double is the current simulation time. If the function returns true, the simulation is terminated. The default for this is a function that always returns false.
| bool warn_real_time_violation |
This variable dermines what happens if the simulation's timing is delayed by more than timeout_seconds.
When this occurs, a warning is printed if this variable is true, and an exception is raised if this variable is false.
The documentation for this struct was generated from the following file:
 1.8.11
1.8.11 
