|
Drake
|
|
Drake
|
#include "drake/systems/plants/constraint/constructPtrRigidBodyConstraint.h"#include "drake/common/drake_assert.h"#include "drake/systems/plants/RigidBodyTree.h"#include "drake/systems/plants/constraint/RigidBodyConstraint.h"#include "drake/util/drakeMexUtil.h"#include "drake/systems/controllers/controlUtil.h"
Functions | |
| void | checkBodyOrFrameID (const int body, const RigidBodyTree *model, const char *body_var_name="body") |
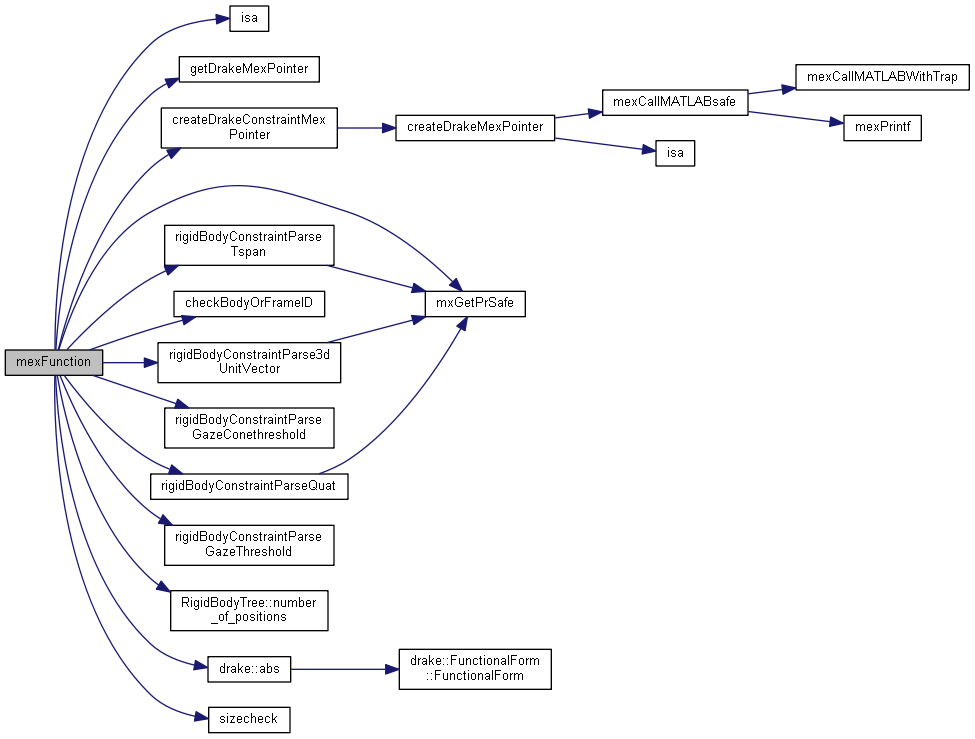
| void | mexFunction (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| void checkBodyOrFrameID | ( | const int | body, |
| const RigidBodyTree * | model, | ||
| const char * | body_var_name = "body" |
||
| ) |

| void mexFunction | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
 1.8.11
1.8.11 
