|
| | FixedJoint (const std::string &name, const Eigen::Isometry3d &transform_to_parent_body) |
| |
| virtual | ~FixedJoint () |
| |
| template<typename DerivedQ > |
| Eigen::Transform< typename DerivedQ::Scalar, 3, Eigen::Isometry > | jointTransform (const Eigen::MatrixBase< DerivedQ > &q) const |
| |
| template<typename DerivedQ , typename DerivedMS > |
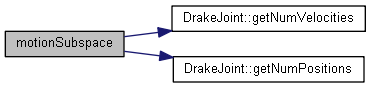
| void | motionSubspace (const Eigen::MatrixBase< DerivedQ > &q, Eigen::MatrixBase< DerivedMS > &motion_subspace, typename drake::math::Gradient< DerivedMS, Eigen::Dynamic >::type *dmotion_subspace=nullptr) const |
| |
| template<typename DerivedQ , typename DerivedV > |
| void | motionSubspaceDotTimesV (const Eigen::MatrixBase< DerivedQ > &q, const Eigen::MatrixBase< DerivedV > &v, Eigen::Matrix< typename DerivedQ::Scalar, 6, 1 > &motion_subspace_dot_times_v, typename drake::math::Gradient< Eigen::Matrix< typename DerivedQ::Scalar, 6, 1 >, Eigen::Dynamic >::type *dmotion_subspace_dot_times_vdq=nullptr, typename drake::math::Gradient< Eigen::Matrix< typename DerivedQ::Scalar, 6, 1 >, Eigen::Dynamic >::type *dmotion_subspace_dot_times_vdv=nullptr) const |
| |
| template<typename DerivedQ > |
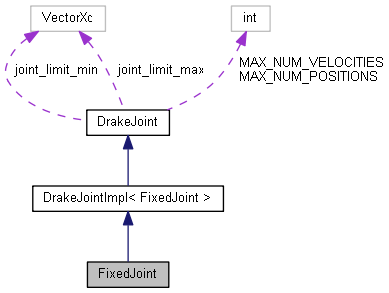
| void | qdot2v (const Eigen::MatrixBase< DerivedQ > &q, Eigen::Matrix< typename DerivedQ::Scalar, Eigen::Dynamic, Eigen::Dynamic, 0, MAX_NUM_VELOCITIES, MAX_NUM_POSITIONS > &qdot_to_v, Eigen::Matrix< typename DerivedQ::Scalar, Eigen::Dynamic, Eigen::Dynamic > *dqdot_to_v) const |
| |
| template<typename DerivedQ > |
| void | v2qdot (const Eigen::MatrixBase< DerivedQ > &q, Eigen::Matrix< typename DerivedQ::Scalar, Eigen::Dynamic, Eigen::Dynamic, 0, MAX_NUM_POSITIONS, MAX_NUM_VELOCITIES > &v_to_qdot, Eigen::Matrix< typename DerivedQ::Scalar, Eigen::Dynamic, Eigen::Dynamic > *dv_to_qdot) const |
| |
| template<typename DerivedV > |
| Eigen::Matrix< typename DerivedV::Scalar, Eigen::Dynamic, 1 > | frictionTorque (const Eigen::MatrixBase< DerivedV > &v) const |
| |
| std::string | getPositionName (int index) const override |
| |
| Eigen::VectorXd | zeroConfiguration () const override |
| |
| Eigen::VectorXd | randomConfiguration (std::default_random_engine &generator) const override |
| |
| | DrakeJointImpl (FixedJoint &_derived, const std::string &name, const Eigen::Isometry3d &transform_to_parent_body, int num_positions, int num_velocities) |
| |
| virtual | ~DrakeJointImpl () |
| |
| | DrakeJoint (const std::string &name, const Eigen::Isometry3d &transform_to_parent_body, int num_positions, int num_velocities) |
| |
| virtual | ~DrakeJoint () |
| |
| const Eigen::Isometry3d & | getTransformToParentBody () const |
| |
| int | getNumPositions () const |
| |
| int | getNumVelocities () const |
| |
| const std::string & | getName () const |
| |
| virtual std::string | getVelocityName (int index) const |
| |
| virtual bool | isFloating () const |
| |
| virtual const Eigen::VectorXd & | getJointLimitMin () const |
| |
| virtual const Eigen::VectorXd & | getJointLimitMax () const |
| |
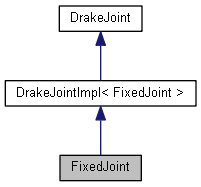
 Public Member Functions inherited from DrakeJointImpl< FixedJoint >
Public Member Functions inherited from DrakeJointImpl< FixedJoint >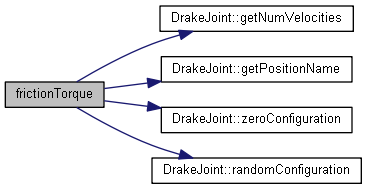
 1.8.11
1.8.11 
