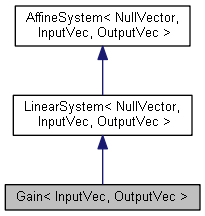
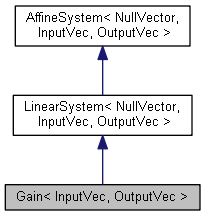
#include <drake/systems/LinearSystem.h>
|
| template<typename Derived > |
| | Gain (const Eigen::MatrixBase< Derived > &D) |
| |
| | LinearSystem (const Eigen::MatrixBase< DerivedA > &A, const Eigen::MatrixBase< DerivedB > &B, const Eigen::MatrixBase< DerivedC > &C, const Eigen::MatrixBase< DerivedD > &D) |
| |
| | AffineSystem (const Eigen::MatrixBase< DerivedA > &A, const Eigen::MatrixBase< DerivedB > &B, const Eigen::MatrixBase< Derivedxdot0 > &xdot0, const Eigen::MatrixBase< DerivedC > &C, const Eigen::MatrixBase< DerivedD > &D, const Eigen::MatrixBase< Derivedy0 > &y0) |
| |
| StateVector< ScalarType > | dynamics (const ScalarType &t, const StateVector< ScalarType > &x, const InputVector< ScalarType > &u) const |
| |
| OutputVector< ScalarType > | output (const ScalarType &t, const StateVector< ScalarType > &x, const InputVector< ScalarType > &u) const |
| |
| bool | isTimeVarying () const |
| |
| bool | isDirectFeedthrough () const |
| |
| size_t | getNumStates () const |
| |
| size_t | getNumInputs () const |
| |
| size_t | getNumOutputs () const |
| |
| Gain |
( |
const Eigen::MatrixBase< Derived > & |
D | ) |
|
|
inlineexplicit |
The documentation for this class was generated from the following file:
 Public Types inherited from LinearSystem< NullVector, InputVec, OutputVec >
Public Types inherited from LinearSystem< NullVector, InputVec, OutputVec > 1.8.11
1.8.11 
