|
Drake
|
|
Drake
|
Utilities for arithmetic on axis-angle rotations. More...
#include <cmath>#include <Eigen/Dense>#include "drake/common/eigen_types.h"#include "drake/math/quaternion.h"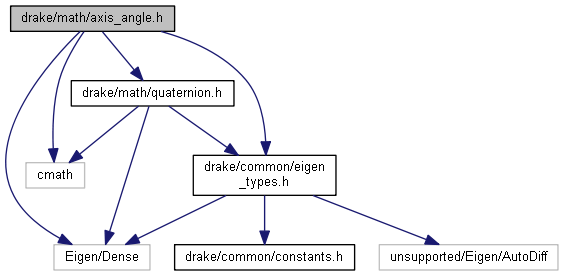
Go to the source code of this file.
Namespaces | |
| drake | |
| drake::math | |
Functions | |
| template<typename Derived > | |
| Vector4< typename Derived::Scalar > | axis2quat (const Eigen::MatrixBase< Derived > &a) |
| template<typename Derived > | |
| Matrix3< typename Derived::Scalar > | axis2rotmat (const Eigen::MatrixBase< Derived > &a) |
| template<typename Derived > | |
| Vector3< typename Derived::Scalar > | axis2rpy (const Eigen::MatrixBase< Derived > &a) |
Utilities for arithmetic on axis-angle rotations.
 1.8.11
1.8.11 
