|
Drake
|
|
Drake
|
#include <mex.h>#include <math.h>#include <set>#include <Eigen/Dense>#include "drake/systems/plants/RigidBodyTree.h"#include <iostream>#include <Eigen/Cholesky>#include <Eigen/LU>#include <Eigen/SVD>#include "drake/util/drakeUtil.h"#include "drake/solvers/fastQP.h"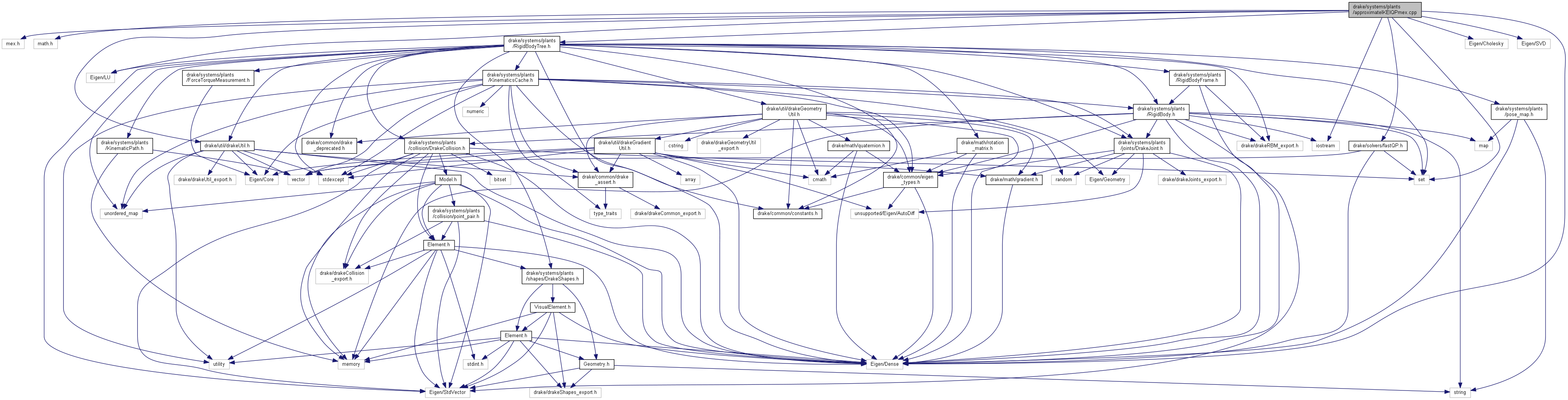
Macros | |
| #define | MAX_CONSTRS 1000 |
| #define | MAX_ITER 20 |
Functions | |
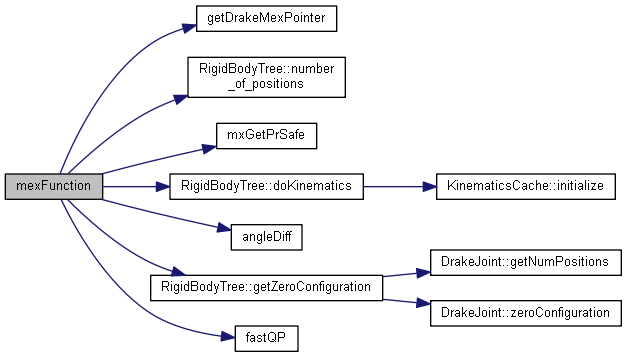
| void | angleDiff (VectorXd phi1, VectorXd phi2, VectorXd *d) |
| void | angleDiff (MatrixXd phi1, MatrixXd phi2, MatrixXd *d) |
| void | mexFunction (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| Use Frank's fastQP code (mexed) [q, info] = approximateIKEIQPmex(objgetMexModelPtr, q0, q_nom, Q, varargin) info = 0 on success, 1 on failure. More... | |
| #define MAX_CONSTRS 1000 |
| #define MAX_ITER 20 |
| void angleDiff | ( | VectorXd | phi1, |
| VectorXd | phi2, | ||
| VectorXd * | d | ||
| ) |

| void angleDiff | ( | MatrixXd | phi1, |
| MatrixXd | phi2, | ||
| MatrixXd * | d | ||
| ) |
| void mexFunction | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
Use Frank's fastQP code (mexed) [q, info] = approximateIKEIQPmex(objgetMexModelPtr, q0, q_nom, Q, varargin) info = 0 on success, 1 on failure.
 1.8.11
1.8.11 
