#include <iostream>
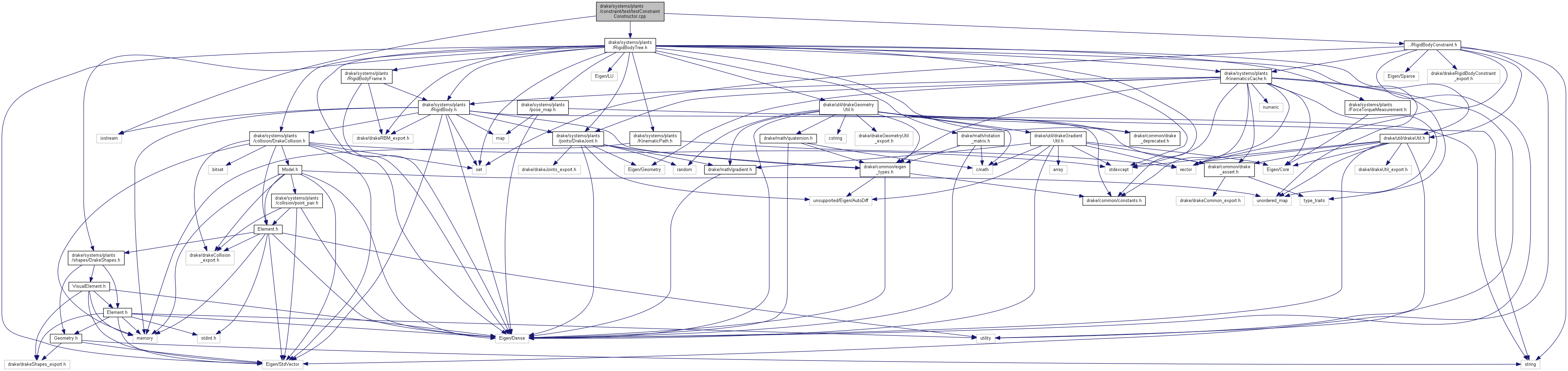
#include "drake/systems/plants/RigidBodyTree.h"
#include "../RigidBodyConstraint.h"
 1.8.11
1.8.11 
