|
Drake
|
|
Drake
|
#include "drake/solvers/qpSpline/splineGeneration.h"#include <Eigen/Dense>#include <iostream>#include <sstream>#include <numeric>#include <stdexcept>#include "drake/common/drake_assert.h"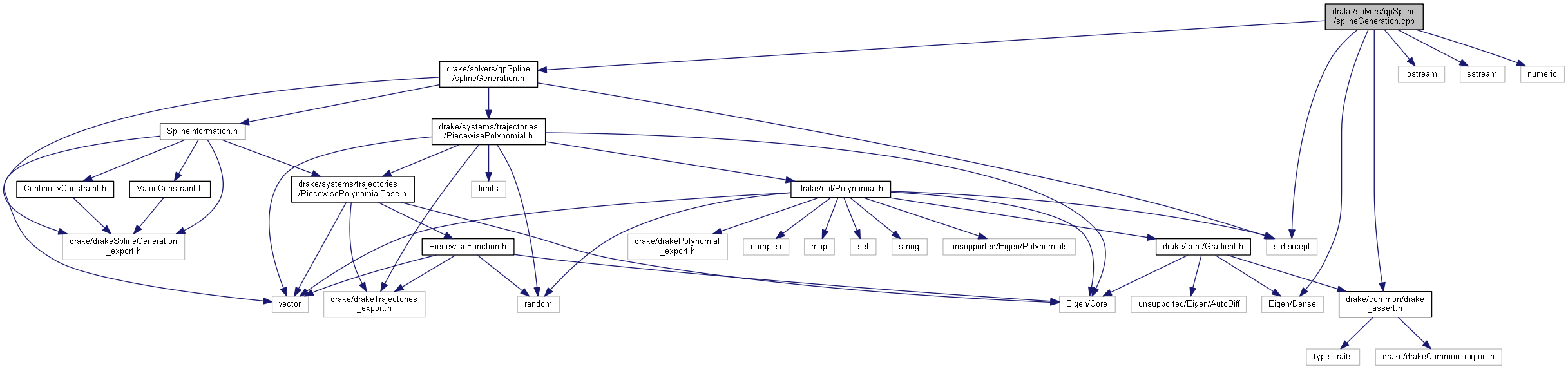
Functions | |
| template<typename DerivedM > | |
| void | setConstraintMatrixPart (double time, int derivative_order, MatrixBase< DerivedM > &constraint_matrix, double scaling=1.0) |
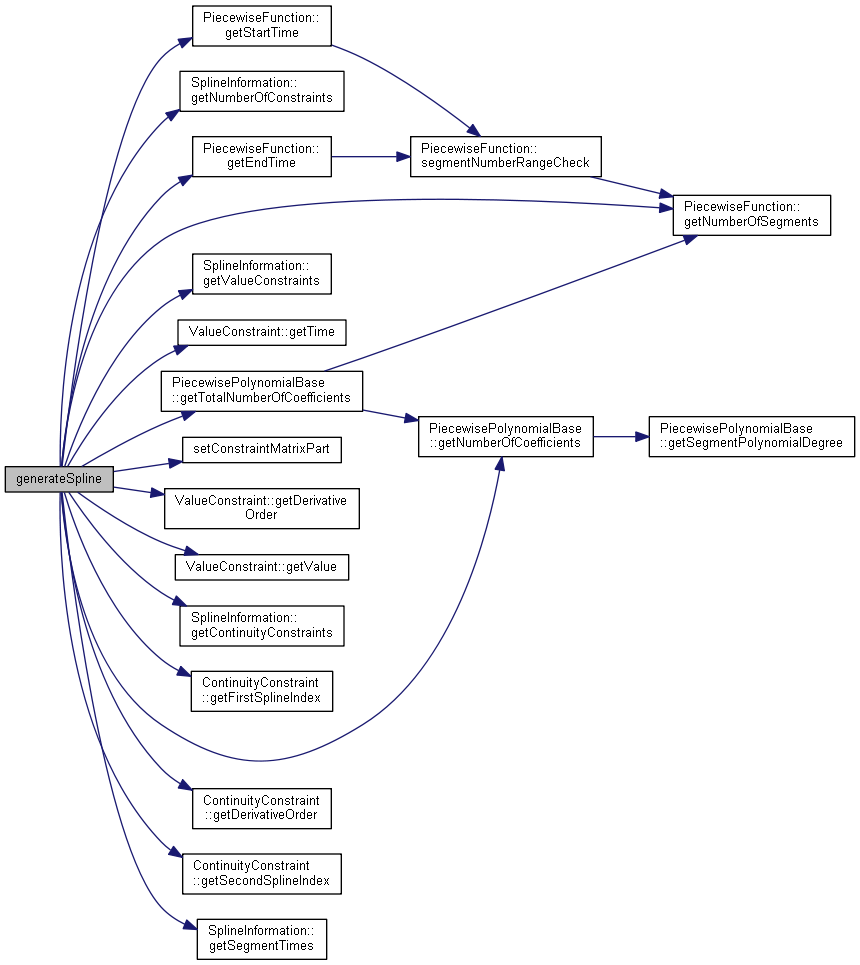
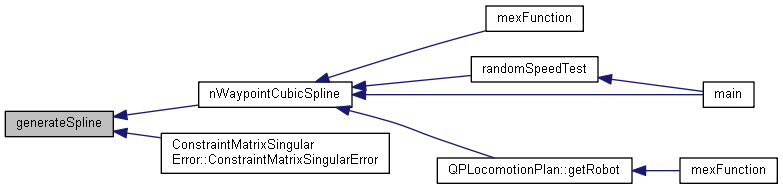
| PiecewisePolynomial< double > | generateSpline (const SplineInformation &spline_information) |
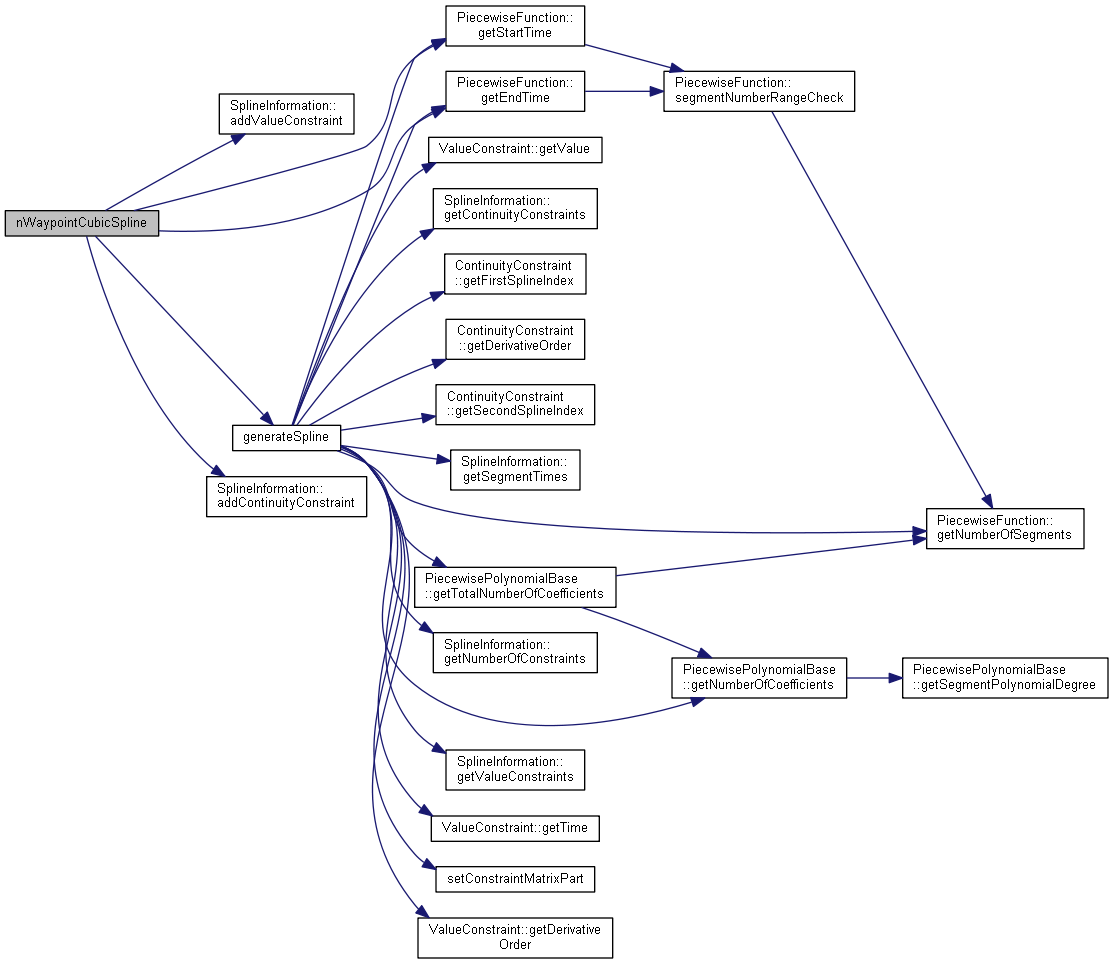
| PiecewisePolynomial< double > | nWaypointCubicSpline (const vector< double > &segment_times, double x0, double xd0, double xf, double xdf, const Ref< const VectorXd > &xi) |
| PiecewisePolynomial<double> generateSpline | ( | const SplineInformation & | spline_information | ) |
| PiecewisePolynomial<double> nWaypointCubicSpline | ( | const vector< double > & | segment_times, |
| double | x0, | ||
| double | xd0, | ||
| double | xf, | ||
| double | xdf, | ||
| const Ref< const VectorXd > & | xi | ||
| ) |
 1.8.11
1.8.11 

