|
Drake
|
|
Drake
|
#include <memory>#include "drake/common/drake_assert.h"#include "drake/core/Function.h"#include "drake/core/Gradient.h"#include "drake/core/Vector.h"#include "drake/systems/System.h"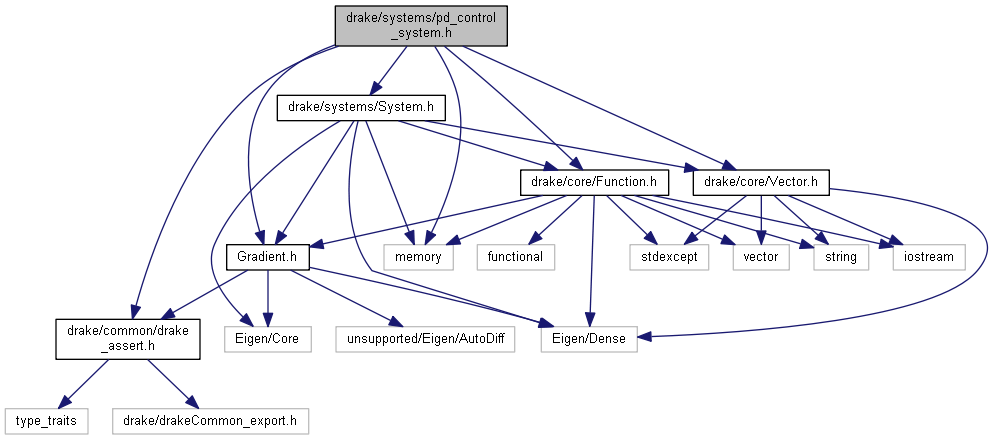
Go to the source code of this file.
Classes | |
| class | PDControlSystem< System > |
| PDControlSystem<System> More... | |
Namespaces | |
| Drake | |
| NOTE: The contents of this class are for the most part direct ports of drake/systems/plants//inverseKinBackend.m from Matlab to C++; many methods and variables follow Matlab conventions and are documented in that file. | |
 1.8.11
1.8.11 
