|
Drake
|
|
Drake
|
Functions | |
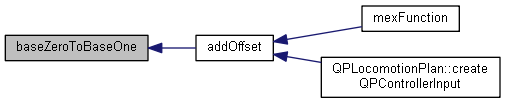
| void | baseZeroToBaseOne (std::vector< int > &vec) |
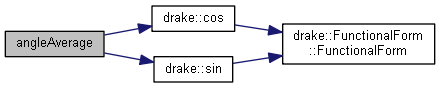
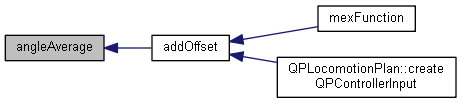
| double | angleAverage (double theta1, double theta2) |
| template<typename DerivedTorque , typename DerivedForce , typename DerivedNormal , typename DerivedPoint > | |
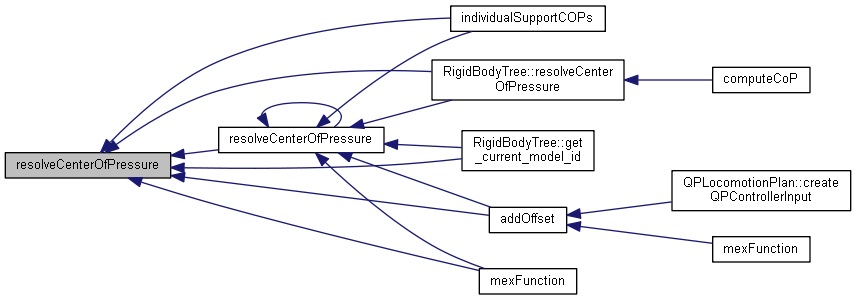
| std::pair< Eigen::Vector3d, double > | resolveCenterOfPressure (const Eigen::MatrixBase< DerivedTorque > &torque, const Eigen::MatrixBase< DerivedForce > &force, const Eigen::MatrixBase< DerivedNormal > &normal, const Eigen::MatrixBase< DerivedPoint > &point_on_contact_plane) |
| void baseZeroToBaseOne | ( | std::vector< int > & | vec | ) |
| std::pair<Eigen::Vector3d, double> resolveCenterOfPressure | ( | const Eigen::MatrixBase< DerivedTorque > & | torque, |
| const Eigen::MatrixBase< DerivedForce > & | force, | ||
| const Eigen::MatrixBase< DerivedNormal > & | normal, | ||
| const Eigen::MatrixBase< DerivedPoint > & | point_on_contact_plane | ||
| ) |

 1.8.11
1.8.11 
