|
Drake
|
|
Drake
|
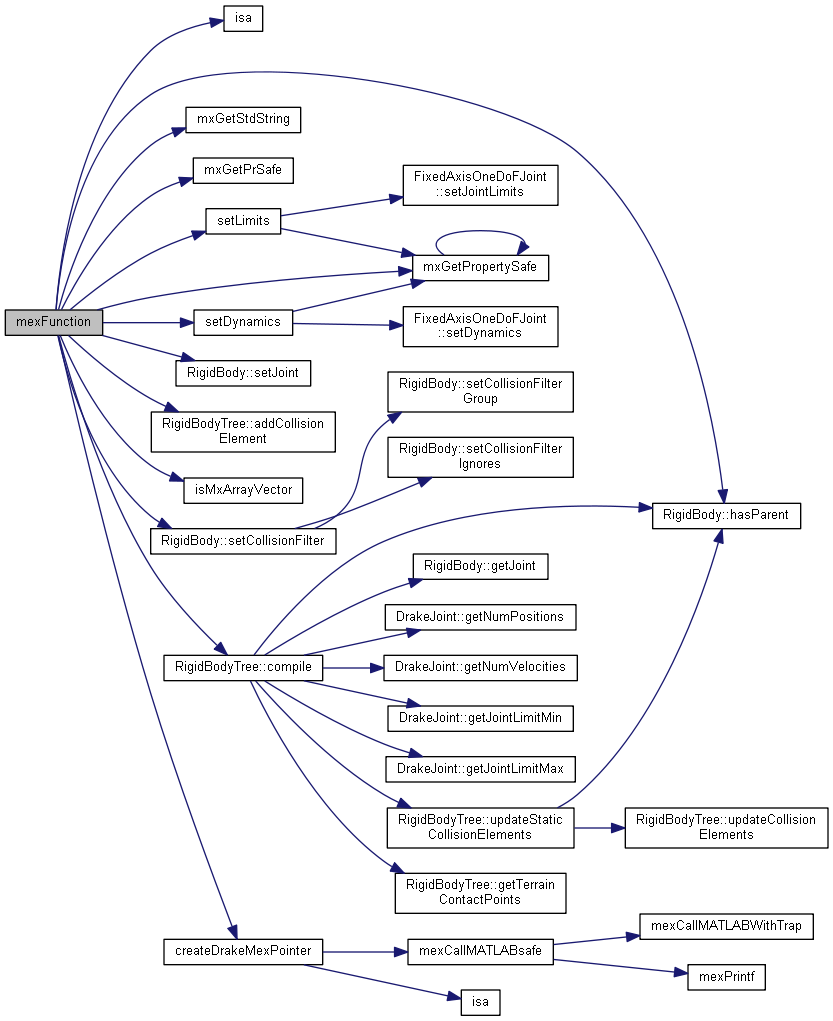
#include <mex.h>#include <iostream>#include <cmath>#include "drake/util/drakeMexUtil.h"#include "rigidBodyTreeMexConversions.h"#include <stdexcept>#include "drake/systems/plants/joints/DrakeJoints.h"
Functions | |
| bool | isMxArrayVector (const mxArray *array) |
| template<typename Derived > | |
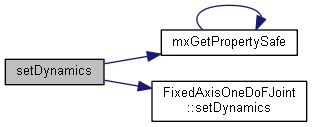
| void | setDynamics (const mxArray *pBodies, int i, FixedAxisOneDoFJoint< Derived > *fixed_axis_one_dof_joint) |
| template<typename Derived > | |
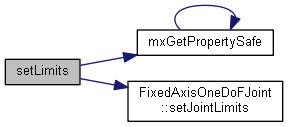
| void | setLimits (const mxArray *pBodies, int i, FixedAxisOneDoFJoint< Derived > *fixed_axis_one_dof_joint) |
| void | mexFunction (int nlhs, mxArray *plhs[], int nrhs, const mxArray *prhs[]) |
| bool isMxArrayVector | ( | const mxArray * | array | ) |

| void mexFunction | ( | int | nlhs, |
| mxArray * | plhs[], | ||
| int | nrhs, | ||
| const mxArray * | prhs[] | ||
| ) |
| void setDynamics | ( | const mxArray * | pBodies, |
| int | i, | ||
| FixedAxisOneDoFJoint< Derived > * | fixed_axis_one_dof_joint | ||
| ) |

| void setLimits | ( | const mxArray * | pBodies, |
| int | i, | ||
| FixedAxisOneDoFJoint< Derived > * | fixed_axis_one_dof_joint | ||
| ) |

 1.8.11
1.8.11 
