|
Drake
|
|
Drake
|
#include <drake/systems/plants/RigidBodySystem.h>
Public Member Functions | |
| RigidBodyPropellor (RigidBodySystem &sys, tinyxml2::XMLElement *node, const std::string &name) | |
| ~RigidBodyPropellor () override | |
| size_t | getNumInputs () const override |
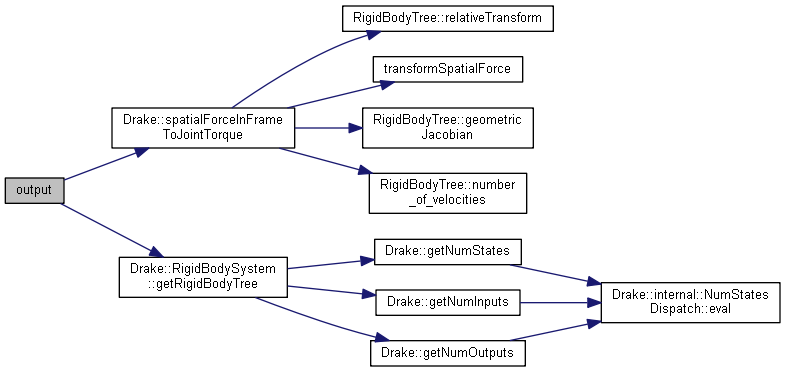
| Eigen::VectorXd | output (const double &t, const Eigen::VectorXd &u, const KinematicsCache< double > &rigid_body_state) const override |
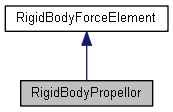
 Public Member Functions inherited from RigidBodyForceElement Public Member Functions inherited from RigidBodyForceElement | |
| RigidBodyForceElement (RigidBodySystem &sys, const std::string &name) | |
| virtual | ~RigidBodyForceElement () |
Additional Inherited Members | |
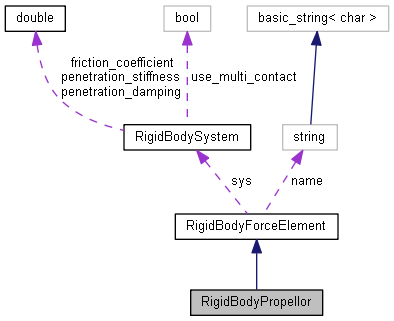
| Protected Attributes inherited from RigidBodyForceElement | |
| RigidBodySystem & | sys |
| std::string | name |
Models the forces and moments produced by a simple propellor
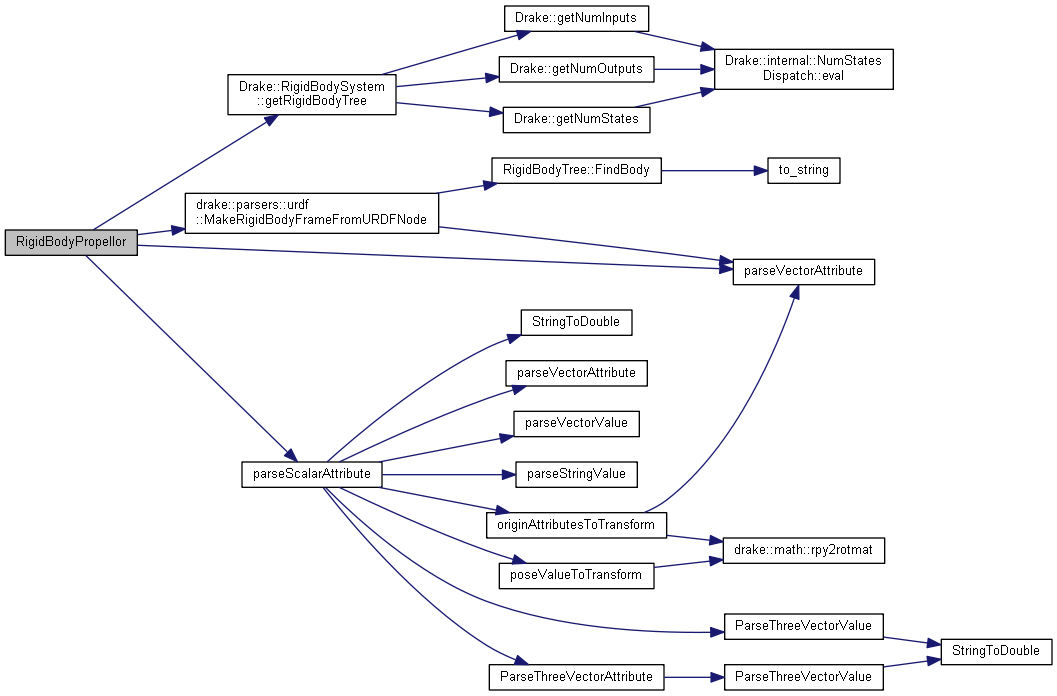
| RigidBodyPropellor | ( | RigidBodySystem & | sys, |
| tinyxml2::XMLElement * | node, | ||
| const std::string & | name | ||
| ) |
|
inlineoverride |
|
inlineoverridevirtual |
Reimplemented from RigidBodyForceElement.
|
inlineoverridevirtual |
 1.8.11
1.8.11