|
Drake
|
|
Drake
|
#include "drake/systems/plants/collision/bullet_model.h"#include "drake/common/drake_assert.h"#include <iostream>#include "BulletCollision/NarrowPhaseCollision/btRaycastCallback.h"#include "drake/systems/plants/collision/DrakeCollision.h"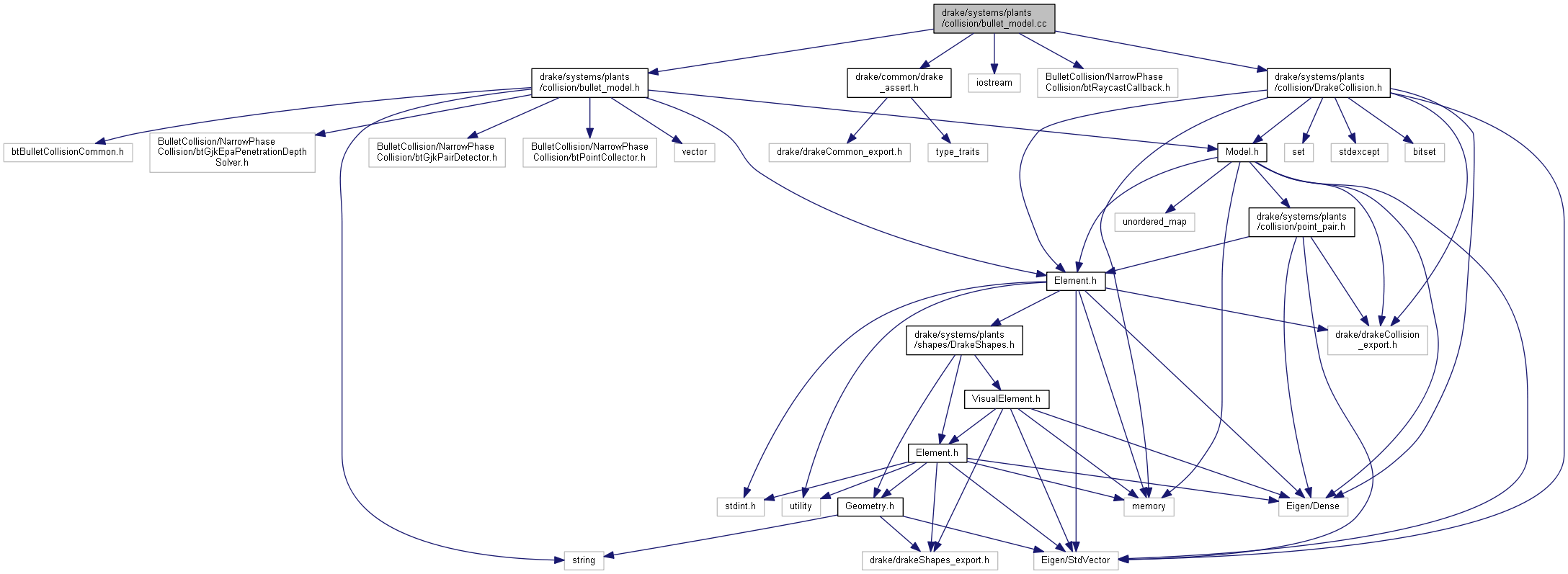
Namespaces | |
| DrakeCollision | |
Functions | |
| Eigen::Map< const Vector3d > | toVector3d (const btVector3 &bt_vec) |
Variables | |
| static const int | kPerturbationIterations = 8 |
| static const int | kMinimumPointsPerturbationThreshold = 8 |
 1.8.11
1.8.11 
