|
Drake
|
|
Drake
|
#include <drake/systems/controllers/QPCommon.h>
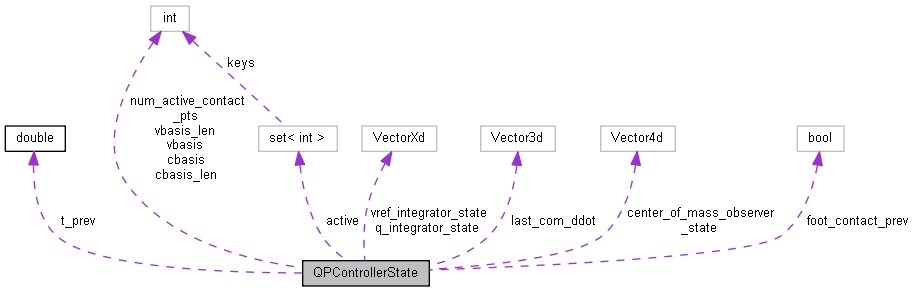
Public Attributes | |
| double | t_prev |
| bool | foot_contact_prev [2] |
| Eigen::VectorXd | vref_integrator_state |
| Eigen::VectorXd | q_integrator_state |
| std::set< int > | active |
| int | num_active_contact_pts |
| Eigen::Vector4d | center_of_mass_observer_state |
| Eigen::Vector3d | last_com_ddot |
| int * | vbasis |
| int * | cbasis |
| int | vbasis_len |
| int | cbasis_len |
| std::set<int> active |
| int* cbasis |
| int cbasis_len |
| Eigen::Vector4d center_of_mass_observer_state |
| bool foot_contact_prev[2] |
| Eigen::Vector3d last_com_ddot |
| int num_active_contact_pts |
| Eigen::VectorXd q_integrator_state |
| double t_prev |
| int* vbasis |
| int vbasis_len |
| Eigen::VectorXd vref_integrator_state |
 1.8.11
1.8.11 
