|
| template<typename Scalar > |
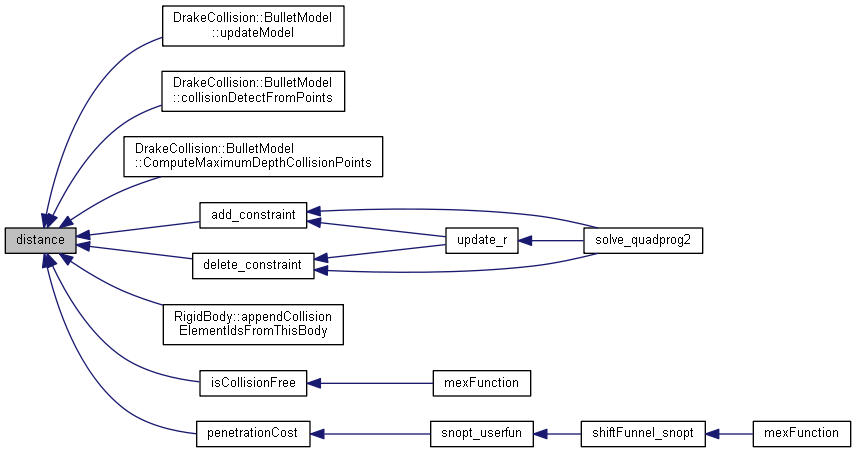
| Scalar | distance (Scalar a, Scalar b) |
| |
| void | compute_d (VectorXd &d, const MatrixXd &J, const VectorXd &np) |
| |
| void | update_z (VectorXd &z, const MatrixXd &J, const VectorXd &d, int iq) |
| |
| void | update_r (const MatrixXd &R, VectorXd &r, const VectorXd &d, int iq) |
| |
| bool | add_constraint (MatrixXd &R, MatrixXd &J, VectorXd &d, int &iq, double &R_norm) |
| |
| void | delete_constraint (MatrixXd &R, MatrixXd &J, VectorXi &A, VectorXd &u, int p, int &iq, int l) |
| |
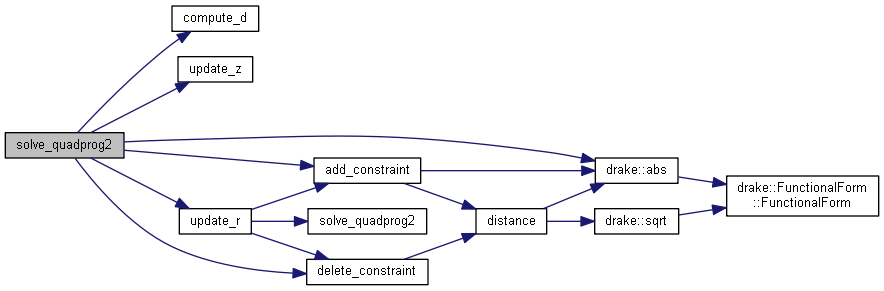
| double | solve_quadprog2 (LLT< MatrixXd, Lower > &chol, double c1, VectorXd &g0, const MatrixXd &CE, const VectorXd &ce0, const MatrixXd &CI, const VectorXd &ci0, VectorXd &x) |
| |
| template<typename tA , typename tB , typename tC , typename tD , typename tE , typename tF , typename tG > |
| double | solve_quadprog (MatrixBase< tA > &G, MatrixBase< tB > &g0, const MatrixBase< tC > &CE, const MatrixBase< tD > &ce0, const MatrixBase< tE > &CI, const MatrixBase< tF > &ci0, MatrixBase< tG > &x) |
| |
| template<typename tA , typename tB , typename tC , typename tD , typename tE , typename tF > |
| double | solve_quadprog2 (LLT< MatrixXd, Lower > &chol, double c1, MatrixBase< tA > &g0, const MatrixBase< tB > &CE, const MatrixBase< tC > &ce0, const MatrixBase< tD > &CI, const MatrixBase< tE > &ci0, MatrixBase< tF > &x) |
| |











 1.8.11
1.8.11 
