|
Drake
|
|
Drake
|
#include "drake/util/drakeGeometryUtil.h"#include <Eigen/Sparse>#include <stdexcept>#include "drake/math/axis_angle.h"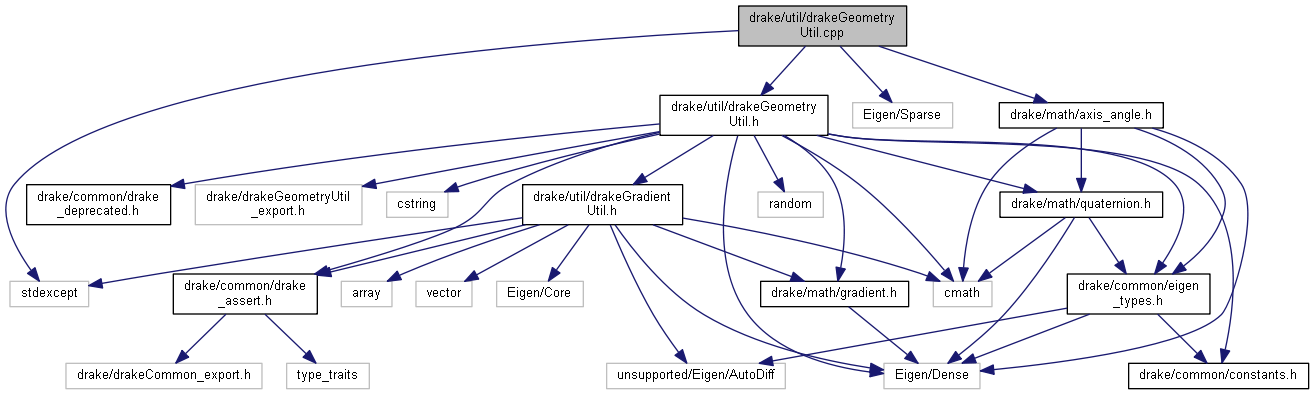
Functions | |
| double | angleDiff (double phi1, double phi2) |
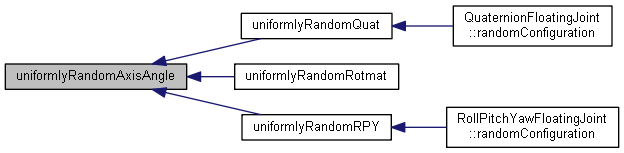
| Vector4d | uniformlyRandomAxisAngle (std::default_random_engine &generator) |
| Vector4d | uniformlyRandomQuat (std::default_random_engine &generator) |
| Eigen::Matrix3d | uniformlyRandomRotmat (std::default_random_engine &generator) |
| Eigen::Vector3d | uniformlyRandomRPY (std::default_random_engine &generator) |
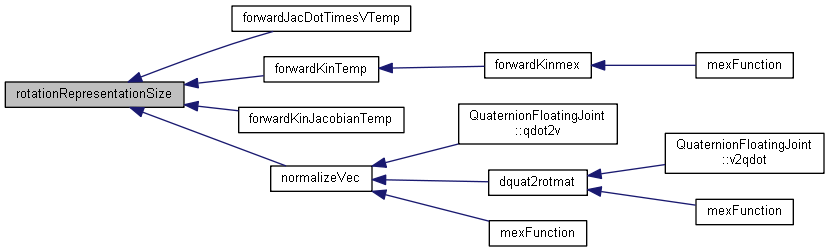
| DRAKEGEOMETRYUTIL_EXPORT int | rotationRepresentationSize (int rotation_type) |
| DRAKEGEOMETRYUTIL_EXPORT int rotationRepresentationSize | ( | int | rotation_type | ) |
| Vector4d uniformlyRandomAxisAngle | ( | std::default_random_engine & | generator | ) |
| Vector4d uniformlyRandomQuat | ( | std::default_random_engine & | generator | ) |


| Eigen::Matrix3d uniformlyRandomRotmat | ( | std::default_random_engine & | generator | ) |

| Eigen::Vector3d uniformlyRandomRPY | ( | std::default_random_engine & | generator | ) |


 1.8.11
1.8.11 
